PiCAN 2 – CAN-Bus Board voor Raspberry Pi (OBDII)
In deze video zien we hoe real-time OBD2-dataloggen kan worden gedaan met PiCAN 2 en de Raspberry Pi.
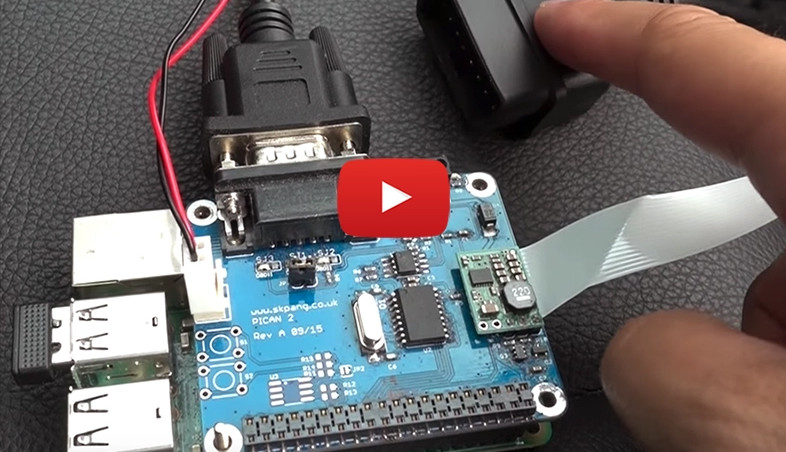
Een PiCAN 2 HAT geeft uw Raspberry Pi volledige CAN-Bus-functionaliteit: CAN v2.0B bij 1 Mb/s en snelle (10 MHz) SPI -interface. Hij werkt met een Microchip MCP2515 CAN-controller en een MCP2551 CAN-transceiver. De verbinding wordt gemaakt via een 9-polige D-connector of via een 3-polige schroefconnector. De SocketCAN-driver is gemakkelijk te installeren. Hij verschijnt voor de toepassing als can0. Hij is te programmeren in Python of in C.
In deze video zien we hoe real-time OBD2-dataloggen kan worden gedaan met PiCAN 2 en de Raspberry Pi. Zowel de Raspberry Pi als de PiCAN 2 worden hier gevoed uit de OBD2-poort. De Pi kan Sluit gewoon de (optionele) voeding aan, wacht tot de RPi-2 of -3 is opgestart en volg de logging van alle beschikbare informatie (zoals snelheid, toerental, temperatuur, ...).
Het commando
./cansend can0 7DF#0201050000000000
stuurt een CAN-ID (7DF), gevolgd een verzoek om de temperatuur van de koelvloeistof (data 02 01 05). Gebruik het commando
./candump can0
om het verkeer op een CAN-busnetwerk te volgen.
Het kan zijn dat candump op sommige voertuigen niet werkt, omdat er een gateway is die de OBDII-poort scheidt van het CAN-netwerk. Als dat het geval is, stuur dan eerst een OBDII-request, zoals het getoonde temperatuurverzoek.
Vergeet niet om het toepassingsprogramma af te sluiten, voordat u de Pi uitschakelt. Alleen dan wordt de logfile op de geheugenkaart netjes afgesloten!
In deze video zien we hoe real-time OBD2-dataloggen kan worden gedaan met PiCAN 2 en de Raspberry Pi. Zowel de Raspberry Pi als de PiCAN 2 worden hier gevoed uit de OBD2-poort. De Pi kan Sluit gewoon de (optionele) voeding aan, wacht tot de RPi-2 of -3 is opgestart en volg de logging van alle beschikbare informatie (zoals snelheid, toerental, temperatuur, ...).
Het commando
./cansend can0 7DF#0201050000000000
stuurt een CAN-ID (7DF), gevolgd een verzoek om de temperatuur van de koelvloeistof (data 02 01 05). Gebruik het commando
./candump can0
om het verkeer op een CAN-busnetwerk te volgen.
Het kan zijn dat candump op sommige voertuigen niet werkt, omdat er een gateway is die de OBDII-poort scheidt van het CAN-netwerk. Als dat het geval is, stuur dan eerst een OBDII-request, zoals het getoonde temperatuurverzoek.
Vergeet niet om het toepassingsprogramma af te sluiten, voordat u de Pi uitschakelt. Alleen dan wordt de logfile op de geheugenkaart netjes afgesloten!
Functies
- CAN v2.0B op 1 Mb/s
- Snelle (10 MHz)
- Standaard en uitgebreide data- en remote-frames
- CAN-verbinding via standaard 9-polige D-connector of schroefaansluiting
- Compatibel met OBDII-kabel
- Soldeerbrug voor de configuratie van de DB9-connector
- Voorbereid voor 120Ω-afsluiting
- Geschikt voor serieel LCD
- LED-indicator
- Ruimte voor twee mini-drukknoppen
- Vier bevestigingsgaten volgens de Pi HAT-standaard
- SocketCAN-driver verschijnt als can0 voor de toepassing
- Interrupt RX op GPIO25
Producten

PiCAN 2 – CAN-Bus Board for Raspberry Pi 2/3
€ 44,95
Bekijk in store

PiCAN 2 Duo – CAN-Bus Board for Raspberry Pi 2/3
€ 74,95
Bekijk in store

PiCAN 2 – CAN-Bus Board for Raspberry Pi 2/3 with SMPS
€ 59,95
Bekijk in store

PiCAN 3 – CAN-Bus Board for Raspberry Pi 4 with 3 A SMPS & RTC
€ 89,95
Bekijk in store

PiCAN-M with CAN-Bus Micro-C and RS422 Connector + 3 A SMPS
€ 109,95
Bekijk in store

PiCAN 2 Duo – CAN-Bus Board for Raspberry Pi 4 with 3 A SMPS
€ 99,95
Bekijk in store
Toon alles (6)