Een geavanceerde Raspberry Pi 4-robot die het terrein controleert op gevaar kan mensenlevens redden, vertelt maker Aviv aan Rosie Hattersley.
Stel je een robot voor die het genadeloze zand van de woestijn kan doorkruisen in het donker van de nacht, vele kilometers per keer aflegt en op bepaalde punten stopt om te observeren. Hij zou op deze stopplaatsen videobeelden kunnen verzamelen met een aan de voorkant gemonteerde, bestuurbare zoomcamera met infraroodleds die onzichtbaar zijn voor het blote oog, maar die voor verlichting zorgen zodat de camera kan zien. Vervolgens zou hij deze videobeelden via een gecodeerde draadloze verbinding kunnen doorsturen naar een locatie op afstand. Na het uitkijken naar mogelijke gevaren zouden soldaten of verkenners kunnen worden geïnformeerd of het veilig is om verder te gaan, wat levens, tijd en geld kan besparen. Dit is het concept waar robotliefhebber en ingenieur Aviv Butvinik de afgelopen twee jaar aan heeft gewerkt. In december onthulde hij de tweede versie van zijn Desert Eye bewakingsrobot in een YouTube-video waarin hij laat zien dat de robot bestand is tegen barre omgevingen vol zandstormen: magpi.cc/deserteyeyt.
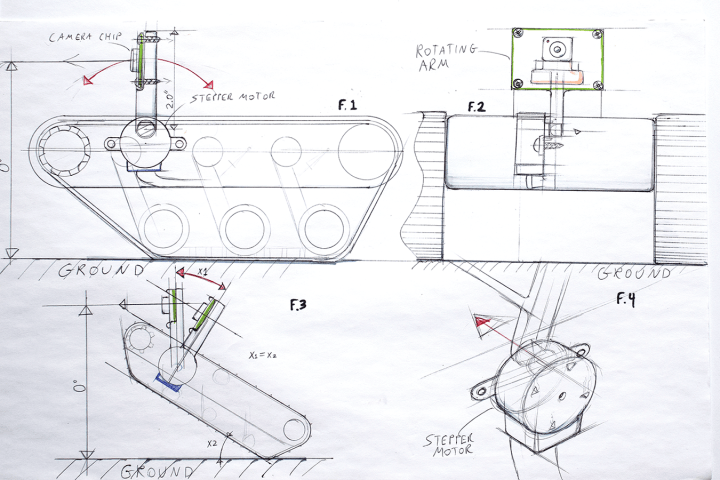
Desert Eye is ook een geweldige showcase voor de Raspberry Pi 4, die Aviv koos vanwege diens videoverwerkingsmogelijkheden − "een belangrijk aspect van deze robot" − en voor de besturing van zijn bewegingen en communicatie. Behalve de camera's bestuurt de Raspberry Pi 4 de twee hoofdmotoren, een stappenmotor zodat de camera kan draaien terwijl hij wordt gestabiliseerd, de GPS- en wificommunicatie, en een drieassige sensor en een ventilator. Aviv begint met een 'ambitieuze visie' van wat hij wil dat zijn robots kunnen doen − en maakt schetsen van hoe het moet werken.
Ambitieuze ontwerpen
Aviv had het soort vroegtijdige stimulansen op school waar de meesten van ons alleen maar van kunnen dromen. Hij bouwde modelraketten, boten van piepschuim en gemotoriseerde auto's van balsahout met zijn natuurkundeleraar op de lagere school. "Die jaren brachten me een liefde voor wetenschap en technologie bij," vertelt hij. Aviv's vader stelde hem voor zich aan te melden voor de opleiding industrieel ontwerp aan de plaatselijke universiteit, waar hij uiteindelijk zijn draai vond met een voorstel voor een engineeringproject dat hem de eerste plaats opleverde op het Design for Safety Symposium. Dit succes leidde ertoe dat Aviv een baan aannam als werktuigbouwkundig ingenieur en industrieel ontwerper voor het creëren van veiligheidsproducten voor de auto-industrie. Hij vertelt dat de projectuitdagingen en oplossingen waarvoor hij zich gesteld ziet, hem aan het denken zetten over "de fysieke krachten, elektrotechniek en kinematica die bij ontwerpen komen kijken".
Aviv's passie voor robotica bracht hem ertoe bijna elk aspect van Desert Eye zelf te ontwerpen, inclusief de dynamiek van de ophanging, die hij van het eerste ontwerp naar de huidige versie heeft overgebracht. In een ideale wereld zou hij zijn eigen bevestigingsmiddelen, motoren en zelfs zijn eigen versie van de Raspberry Pi 4 hebben ontworpen. Aviv kocht onderdelen bij verschillende online bronnen en gebruikte een 3D-printshop, maar zijn beste tip is het gebruik van de open source robotbesturingssoftware VIAM (viam.com), die hij verkiest vanwege het gebruiksgemak van het online platform en omdat de Raspberry Pi kan worden geflasht met een Lite-versie van het OS voor de VIAM-server, voor een grotere verwerkingssnelheid. "Het VIAM-team heeft me vele uren geholpen om Desert Eye precies goed te programmeren en ik hoop in de toekomst weer met ze samen te werken aan enkele van de meer geavanceerde visies die ik voor de robot heb."
Aviv was ervan overtuigd dat de Raspberry Pi 4 krachtig genoeg was om de beelden van zijn bewakingsrobot te verwerken, maar de infraroodleds aan weerszijden van de cameramodule hadden de neiging om de beelden te vervagen. Door ze verder weg van de camera te plaatsen en ze van de grond af te richten, zodat de lichtbundels smaller waren en zo'n 30 cm voor de robot uit schenen, werd een eenvoudige maar effectieve oplossing gevonden. Desert Eye 2.0 in het wild gespot bij manoeuvres
Uitproberen en verbeteren
Veel van de uitdagingen voor het ontwerp van Desert Eye hebben te maken met de voortbeweging. De eerste versie van de robot had een te complexe rupsband en een dubbel tandwielsysteem dat de tank aandreef. "Het zag eruit en werkte als de ophanging van een normale tank," aldus Aviv, maar de rupsbanden liepen soms van hun tandwielen af door hobbels in de weg. Aviv heeft deze vervangen door een lichtere, 3D-geprinte elastische rupsband die veel meer trillingen en uitlijnfouten kan verdragen dan een geschakelde band.
Aviv ontdekte ook dat wanneer de robot opstartte, "de spanning van de rupsband enorm daalde (extra speling), omdat de looprollen allemaal naar binnen bewogen." Hij loste dit op door een tweede arm aan de achterste looprol toe te voegen om het spanningsverlies te compenseren.