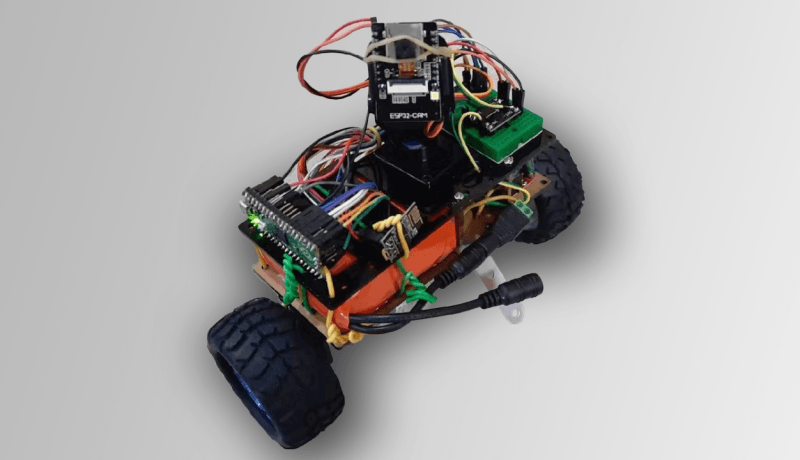
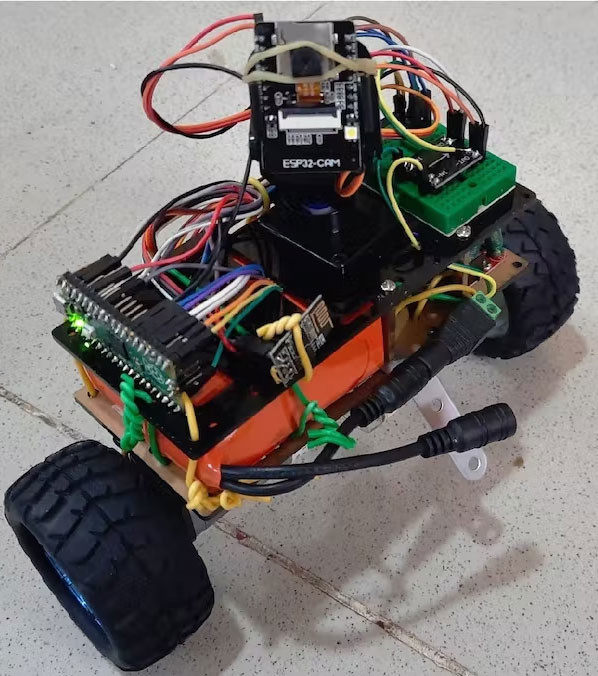
Een zelfbalancerende robot op twee wielen is altijd leuk om mee te spelen, maar deze is via Wi-Fi bestuurbaar, en hij geeft een live videostream door via zijn ESP32 Camera Module!
Hier is een geweldig project van aadhuniklabs op hackster.io dat het gebruik van Proportioneel-Integraal-Derivatieve (PID) regeling demonstreert, en dan verder gaat met het toevoegen van een afstandsbediening via Wi-Fi en een ESP32 Camera Module.
Een PID regeling is essentieel op veel gebieden, vooral in de industrie en de robotica: Om elke vorm van autonome activiteit te kunnen uitvoeren, hebben we een methode nodig om te meten of we het juiste doen of niet, zodat we ons gedrag dienovereenkomstig kunnen corrigeren.
De feedback-lus die inherent is aan het PID-mechanisme is wat onze robot overeind houdt. Leunt hij iets te ver naar voren? Beweeg dan de wielen iets naar voren om hun achterstand te compenseren, en omgekeerd.
Om dit te bereiken demonstreert de auteur het gebruik van een Raspberry Pi Pico board dat in dual-core modus draait op 250 MHz. De robot in evenwicht krijgen is een indrukwekkende prestatie zonder ledematen. De rest is gewoon imponerend:
Een ESP32 Camera Module stuurt via Wi-Fi (ESP8266) een live video-feed naar de host controller (een PC), en je kunt de robot besturen om hem te bewegen (zodat hij meer doet dan alleen maar balanceren). Moet je de robot precies in dezelfde richting sturen als je de camera wilt laten kijken? Nee, de robot heeft ook een pan-tilt-zoom controller voor de camera, zodat je de camera kunt bewegen terwijl de robot zich met de balans bezighoudt.
Het beste van alles is dat de documentatie voor dit alles echt uitgebreid is, zodat je het allemaal in ongeveer drie uur aan de praat kunt krijgen. Bekijk het gedetailleerde project hier.